Projekte
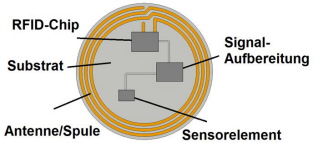
IDicht
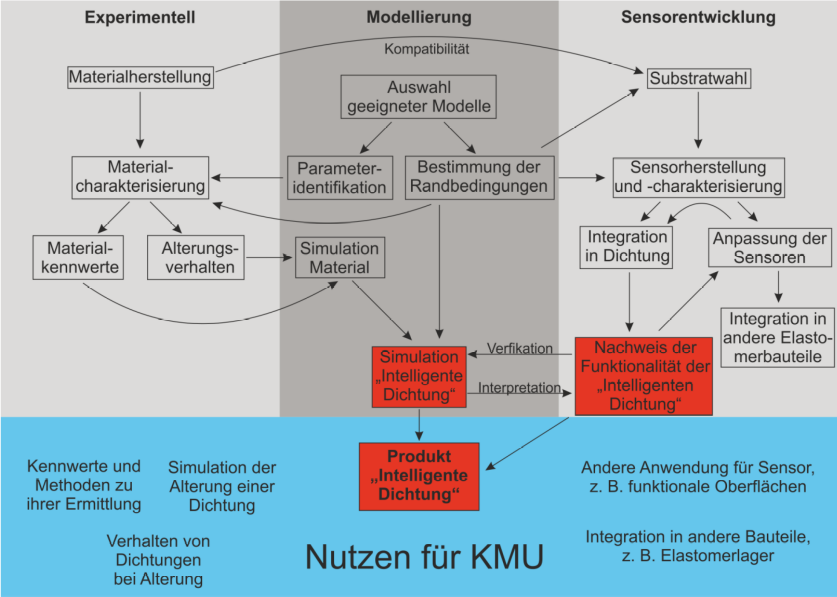
Ein Projekt über die Zustandsbestimmung von Elastomerdichtungen mit integrierten Drucksensoren.
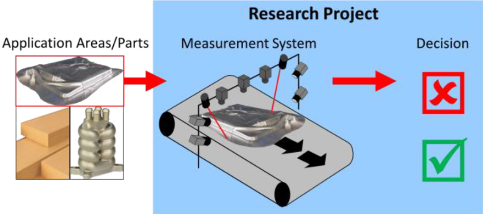
READSET
Reproduzierbare Applikation von drahtloser Sensorik in technischen Textilien für Faser-Kunststoff-Verbundbauteile auf Basis passiver RFID-Sensortags.
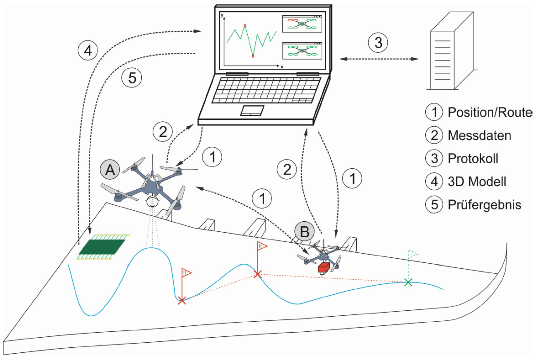
SUrfErCut

Systematische Ursachenforschung von Erosionsschäden an Windenergieanlagen mittels 3D Röntgen Mikroskopie Computertomographie (XRM)“ als Basis zur Schadensminimierung und Serviceoptimierung.
IQZeProd – Inline quality control for zero-error-products
Prozessintegrierte Qualitätsüberwachung für fehlerfreie Produkte
EEWISE – EMC for Emergent Wireless Systems
Elektromagnetische Verträglichkeit für zukünftige Funksysteme.
VAeroWind
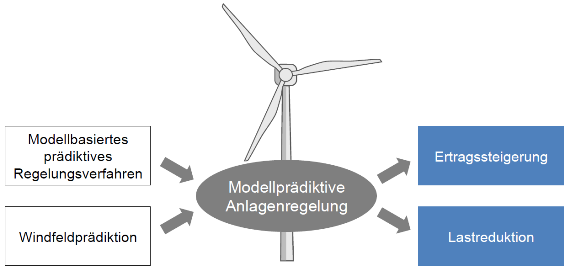
Verbesserte aerodynamische und strukturmechanische Lastvorhersage an Rotorblättern von Windenergieanlagen und deren Anwendung in einer Online-Lastschätzung.
GEOWISOL2
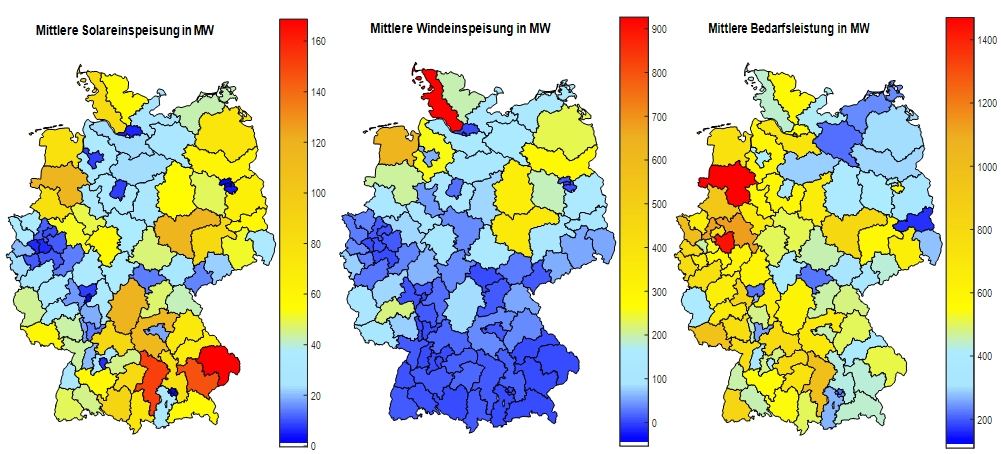
Neues F&E-Projekt zur Analyse der geographischen Verteilung von Wind- und Solarer Einspeisung und deren Einflüsse auf das Stromnetz wurde Bewilligt